
Robot denilen cihazlarda hareket mekanizması, “Robotik Manipülasyon”a yani robot kollara kıyasla daha sonra ortaya çıkmıştır. İnsan dahil birçok hayvanda bulunan bir organ olan kol, robotlara uygulanan ilk sistemlerden biridir. Robotik kollar 20. yüzyılın üretim tekniklerini oldukça geliştirmiştir. Robotik kolların yaptığı iş temel olarak “Manipülasyon” olarak adlandırılır. Zamanla üretim ihtiyaçları ve insanın merak duygusu gereği robotlara hareket özelliği kazandırılmıştır. Robotların hareket etmeye başlaması insanlara çok büyük fayda sağlamıştır. Örneğin, “Mobil Manipülasyon” ile önceden sadece kısıtlı bir çalışma alanına sahip olan robot kolların çalışma alanı gerçek anlamda “sonsuz” genişliğe ulaştırılmıştır. [1]


Şekil 1: Kuka’nın KR 1000 titan robotu. Bir sabit manipülatör. [12]
Şekil 2: Robotnik’in RB-1 robotu. Bir mobil manipülatör. [13]
Peki bu robotlara hareket etme yeteneği kazandırmak için hangi yöntemler kullanılmıştır? Zıplayan, koşan, uçan, kaçan ve yüzen robotları duyduk. Ters takla atanlarını bile duyduk. Ama gerçekten bu ilginç hareket yöntemleri robotlar için en iyisi mi? Yoksa en iyi yöntem hala tekerlek mi?

Şekil 3: Disney Araştırma Laboratuvarının geliştirdiği zıplayan ilginç robot. [14]

Şekil 4: MIT’in ters takla atabilen robotu: MIT Cheetah [15]
Biyolojik olmayan evrimi temsil eden en temel icatlardan birisi tekerlektir. İlginç bir basit makine olan tekerleğin benzerine insan yapıtı olan buluşlar dışında rastlanılması pek mümkün değildir. Evet, yuvarlanan bazı hayvanlar vardır. Örneğin, “Yer Pangolini” adı verilen hayvan kendi vücudunu bir top gibi yuvarlayabilir. Fakat bu hareket tekerleğin gerçek tanımına uymaz: Tekerlek; daire veya çember şeklinde, bir eksen etrafında dönen ve çoğunlukla taşımacılıkta kullanılan araçtır. Doğada, gerçek tekerlek tanımına uyan sadece bir örnek verilebilir: Bazı bakterilerin kamçısı “Bir Eksen Etrafında” dönerek hareket eder. [2][3][4]

Şekil 5: Kendi ekseni etrafında dönen bakteri kamçısının modeli. [3]
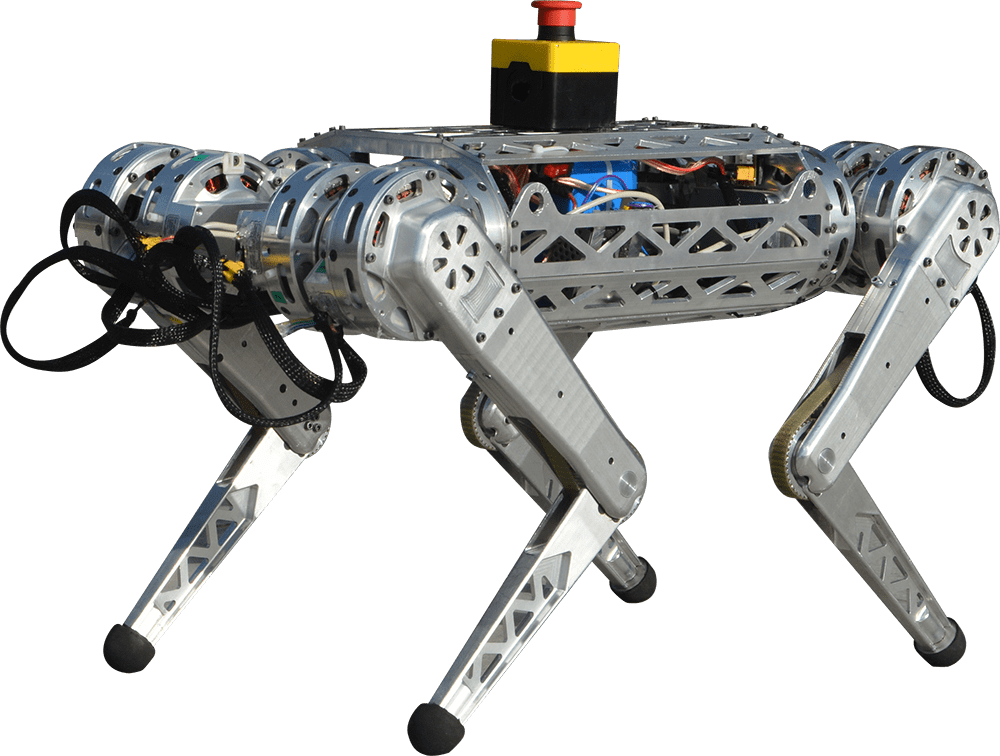
Tekerleğin insanlığa faydası tartışılmayacak derecede büyüktür. İnsanların “Robot” adını verdikleri cihazların çoğu, diğer insan icatları gibi tekerleklerden faydalanır. İnsanlar robotların hareketi konusunda sadece tekerlekle sınırlı kalmamıştır. Bilimdeki diğer birçok gelişmede olduğu gibi doğayı taklit etme yöntemi robotlara da uygulanarak çeşitli hareket mekanizmaları geliştirilmiştir. Yürüyen robotlar belki de doğayı taklit eden robotlar arasında en meşhurudur. Hepimiz “Boston Dynamics” adında bir şirketin bu tarz robotlarla sosyal medyayı sallayan efsanevi videolarını görmüşüzdür. İlk başta devasa boyutlarda dört ayaklı askeri robotlar üreten Boston Dynamics, zamanla çok optimize ve üst düzey kontrol algoritmaları ile doğal hayvanlardaki çevikliği ve esnekliği aratmayan hareket sistemlerine sahip robotlar geliştirmiştir. Özellikle kedi, köpek, çita ve sincap gibi hayvanlardan esinlenilerek yapılan 4 ayaklı hareket sistemlerine sahip robotlar günümüzde gündemdedir. Şimdilik, bu biçime sahip iki robot satın alınabilmektedir. Evet, eğer bu çevik 4 ayaklı robotlar ile laboratuvarınızda araştırma yapmak istiyor veya onlarla eğlenmek istiyorsanız, Boston Dynamics’in Spot adını verdiği robotu veya Unitree’nin A1 adını verdiği robotu satın alabilirsiniz. [10] [11]

Şekil 6: Unitree A1 ve Boston Dynamics Spot [10][11]
Ayaklı robotların avantajları oldukça büyüktür. Örneğin, insanların gidebildiği veya gidemediği çoğu yere gidebilirler. Tekerlekli robotlara karşın, merdiven tırmanabilir veya zıplayabilirler. Birçok yere rahatça ulaşabildikleri için robotik mobil manipülasyonun sınırlarını da genişletirler. Ayaklı robotlardaki en büyük zorluk, denge sorunudur. Robotunuzun sürekli olarak üzerinde durduğu ayak sayısı azaldıkça dengede durması zorlaşır ve denge için aktif tepki sistemleri kullanmanız gerekir. Ayaklı robot geliştirmesinde çalışan bilim insanlarının en çok zorlandığı kısım mekanik tasarım değil denge ve hareket algoritmalarıdır. Örneğin “PID” adı verilen kontrol döngüsü bu robotların genel olarak dengede kalmasına yardımcı olur. “Ters Kinematik” algoritması ise robotunuzun ayaklarını açı bilgisi yerine konum bilgisi ile kontrol edebilmenizi sağlar. Bu ayaklı robotların farklı pürüz ve eğimdeki yüzeylere uyum sağlaması ve dış etkenlerle mücadele etmesi de istenirse kullanılması gereken kontrol algoritmaları daha da karmaşıklaşır. Bu karmaşık algoritmaları geliştirebilmek ve gerekli olabilecek robot tepkilerini önceden tahmin edebilmek için simülasyonlar kullanılır. Günümüzde bu kontrol algoritmaları, çoğunlukla simülasyonlarda makine öğrenmesi tekniklerinin yardımı ile geliştirilmektedir. Robotik biliminde simülasyonlar çok önemlidir çünkü simülasyonda gerçek dünyada var olan gürültü ve dış etkenler de hesaba katılabilir.

Şekil 7: Makine Öğrenmesi ile yürümeyi öğrenen robot: Unitree Laikago [16]
Makine öğrenmesi ile kontrol algoritması geliştirmek aslında bir ırka nesiller boyunca yürümeyi öğretmeye benzer. Simülasyondaki robotunuzu evrim geçirmekte olan bir ırk gibi düşünebilirsiniz: her nesilde, sizin kasten koyduğunuz engelleri daha iyi aşabilen, kuvvet ve ivme sensörlerinden aldığı verilerle daha optimize bir şekilde hareket edebilen bir mekanik canlıdır aslında o. Böylece çevresel etkenler karşısında dengesini koruyabilen ayaklı robotlar ortaya çıkabilmektedir.

Şekil 8: Makine öğrenmesi veya simülasyon kullanılmadan geliştirilen açık kaynaklı robot köpek: Stanford Doggo [17]

Şekil 9: James Bruton tarafından geliştirilen açık kaynaklı robot köpek: OpenDog [18]
Ayaklı robotlar için dengenin çok önemli bir sorun olduğundan bahsetmiştim. Tekerlekli robotlar için böyle bir sorun yoktur. Tabii siz kasten bu sorunu yaratmazsanız. Tekerek sayısını 3’ten aşağıya düşürmeniz size denge problemini verecek fakat hız ve çeviklik gibi üstünlükler de verecektir. Ama tekerlekli robotların -eğer 3’ten az tekeri olanları saymazsanız- genellikle kontrolü pek kolaydır. Herhangi bir denge algoritmasına ihtiyacınız yoktur, daha hızlı gidersiniz, farklı yüzeylerde de pek sorun yaşamazsınız. Gerçekten çok kullanışlı değil mi? Buna ek olarak paletli robotlar da vardır ki onlar pürüzlü yüzeylerde neredeyse ayaklı robotlara yakın bir performans sergiler.

Şekil 10: Tekerlekli bir robota örnek: Arduino Robot. Robotiğe başlangıç için harika. [19]

Şekil 11: Paletli bir robota örnek: SDR Tactical Robot [20]
Sonuç olarak şunu demeliyim: Eğer ana çalışma alanınız robotikte hareket sistemleri değilse ve hareket sistemleri üzerinde geliştirmeler yapmak istemiyorsanız tekerlekli bir mekanizma en mantıklısı. Yani robotikte odağınız farklı ise robotun hareket mekanizmasını basitleştirmek işleri oldukça kolaylaştıracaktır. Fakat, hem tekerlekli hem de ayaklı robotların üstünlüklerini bir arada bulunduran bir hareket sistemi daha vardır ki benim en sevdiğim de bu: Hibrit robotlar. Hem merdiven çıkabilecek, zıplayabilecek hem de tekerlekleri sayesinde oldukça hızlı hareket edebilecek bir robot, sanırım daha iyisi olamazdı.
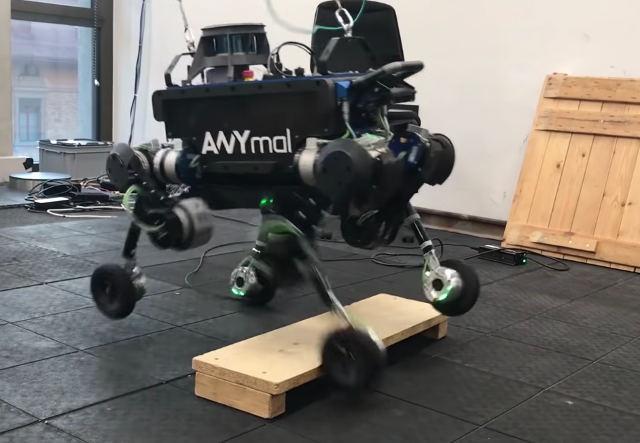
Şekil 12: ANYmal robotunun tekerlekli versiyonu. [5]

Şekil 13: İki ayak ve teker birleşimine sahip harika bir robot: ASCENTO [21]

Şekil 14: Hyundai tarafından Mars araştırmaları için geliştirilen ve hibrit hareket sistemine sahip bir ulaşım aracı.
Aslında daha iyisi olabilirdi, bu yazının devamında hava ve suda hareket edebilen robotlardan bahsedeceğim.
Şekil 15: Türk bir şirket olan Akınrobotics’in geliştirdiği robot: Arat [22]
-Ahmet Akif KAYA
KAYNAKÇA
[1]: https://en.wikipedia.org/wiki/Mobile_manipulator
[2]: https://tr.wikipedia.org/wiki/Tekerlek
[3]: https://en.wikipedia.org/wiki/Rotating_locomotion_in_living_systems
[4]: https://en.wikipedia.org/wiki/Ground_pangolin
[5]: https://www.markobjelonic.com/publications/files/2020_ral_bjelonic.pdf
[6]: https://en.wikipedia.org/wiki/Robot_locomotion
[7]: https://www.ted.com/talks/marc_raibert_meet_spot_the_robot_dog_that_can_run_hop_and_open_doors?language=zh
[8]: https://tr.wikipedia.org/wiki/Robot
[9]: https://en.wikipedia.org/wiki/History_of_robots
[10]: http://www.unitree.cc/
[11]: https://www.bostondynamics.com/spot
[13]: https://robotnik.eu/
[14]: https://la.disneyresearch.com/publication/hoppingbot/
[15]: https://biomimetics.mit.edu/
[16]: https://www.wired.com/story/how-a-real-dog-taught-a-robot-dog-to-walk/
[17]: https://github.com/Nate711/StanfordDoggoProject
[18]: http://www.xrobots.co.uk/open-dog-the-open-source-robot/
[19]: https://store.arduino.cc/usa/arduino-robot
[20]: http://sdrtactical.com/
[21]: https://www.ascento.ethz.ch/
[22]: https://www.akinrobotics.com/tr/akinsoft-dort-ayakli-robot-arat-3-1





Son yorumlar